Computer Vision
We develop solutions based on computer vision and deep learning for any industry. We accompany you throughout the process, designing a tailored solution.

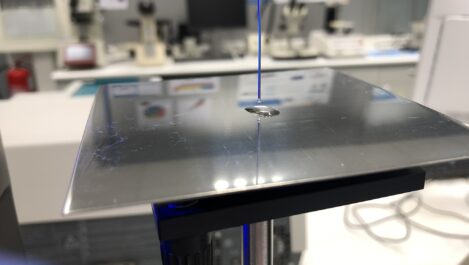
Currently, the placement and storage of the parts at the injector outlet is manual due to the high variability of the references.
Automation of the process with vision and collaborative robot.
Collection and placement of pieces in boxes in an orderly manner, and placement of the protective separation sheets.
Complete vision system integration design (camera, optics and lighting for highly reflective parts), system training and communications with UR.


Your success is our goal. We want to be your partner in the development of your projects, leveraging the power of innovation, flexibility, and the trust we provide. Together, we make a difference through new technologies.
Contact us and let’s build the future together!
We are a team of experts passionate about industrial innovation, committed to excellence, and the success of our clients.


Subscribe to our newsletter, and we’ll send you all the content that interests you directly to your email.