What is industrial robotics?
They are all complex mechanisms that allow automating tasks in an industrial environment. This includes from robotic arms, stackers, 3-axis systems, automatons, etc. They have the characteristic that they must be controlled by external signals and their programmed movements before being able to carry out the assigned tasks. These signals can be from a task start signal given by a PLC to the movement coordinates transmitted by a computer vision system to carry out the next task.
Types of industrial robotics and their differences
The two types of industrial robotics are traditional robots and collaborative robots. In recent years a new type of industrial robot has been defined and differentiated. They are adaptive or intelligent robots.
- The main characteristic of traditional robots is their need to have physical barriers for their use safely.

- In the case of collaborative robots, the most representative characteristic is their design prepared to be able to work in collaboration with the human operator, without the need for physical barriers. A negative consequence of maintaining this form of operation is the lower speed and nominal load of collaborative robotics compared to traditional robotics.

- Adaptive or intelligent robotics is an evolution of both types. It can have the strengths and weaknesses of both types. Both a traditional robot and a collaborative robot can transform into an adaptive or intelligent robot. The main characteristic is its ability to react to the environment and adapt its movements to the specific task it is performing. This is possible thanks to a sensor layer that provides the robot with “senses” and Deep learning or machine learning systems that manage the information received and control the movements of the adaptive or intelligent robot.

Deep learning and neural networks in robotics
The contribution of data by a sensor system to a robot does not by itself provide intelligence or adaptability to the environment and the task it is performing. This data must be processed and treated in order to define the appropriate actions to be carried out by the adaptive or intelligent robot. Depending on its complexity, this data processing can be done using traditional software or deep learning systems and neural networks. Deep learning is used in those systems where decision-making based on sensor data is very complex.

Design of claws and tools for robotics
A very important part of industrial robotics systems is the way of interacting with the product or process. The design of claws and tools is as important as the programming and communication of the robot. These systems must guarantee that the industrial robot does not damage the product and that they perform their task correctly in an industrial process. Sometimes this design can be very complex, either due to the shape of the product to be handled or the complexity of the process.

Applications, benefits and advantages of adaptive or intelligent robotics
The applications of industrial robotics are well known and cover topics such as:
- Assembly
- Loading and unloading of machines. Pick and place
- Packed and palletized
- Transport of parts, removal of parts
- Cuts, grinding and polishing
- Painting processes
- Adhesive and sealant application
- Welding
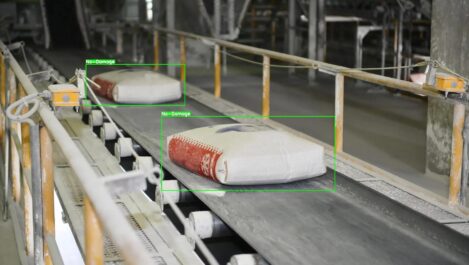
- Measurement and quality control
However, the more complex processes due to their variability are not automated. The creation of programs almost daily for new variants or the impossibility of guaranteeing levels makes industrialization through traditional or collaborative robotics not possible or not profitable. For these cases, adaptive or intelligent robotics offers a solution. Its main advantage is adaptation to the work environment. Instead of working with preset task or motion coordinates, you work with floating points. These points are defined in each case by the sensors we connect to the installation. The sensors supply the information that the control unit uses to define the floating points. This adaptation to the environment is greater or less depending on the processing capacity of the control unit and the resolution and quality of the data provided by the sensors.
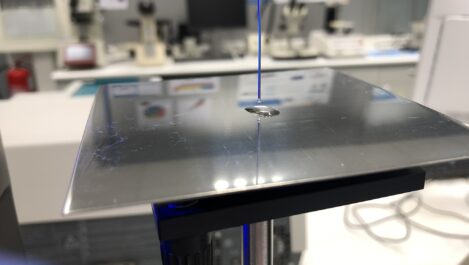
In this Project carried out by ATRIA, you can learn about an adaptive robotics system in which, thanks to a vision camera, the system is able to process and select the point where the battery should be connected, without any type of fixed dimension. Another advantage of adaptive robotics is that it can be applied to pre-existing collaborative or traditional installations with a lower level of investment. This is because the hardware can be fully exploited in the new installation. Finally, another advantage of adaptive or intelligent robotics is its flexibility. If the environment or processes change, the system is able to adapt without an economic investment. Modifications at the software level or sensor updates may be enough for the adaptive or intelligent robotics installation to function properly.
In this other Project and also thanks to an adaptive robotics system, the robot is able to decide how to take the part, since they are received in chaotic, and how they should be placed in the box.

Steps to carry out a robotics Project
The most common steps that we should follow in any automation process in which an industrial robot is involved are:
- Definition of requirements: In this step, the tasks to be carried out by the industrial robot are defined together with the characteristics that it must meet. A good definition of requirements can save a lot of later work and development money in the next steps.
- Hardware and software selection: It should be based on the data obtained in the previous step and on the experience of the work team. In this step it is defined which type of robotic system is the most appropriate, a traditional robot, a collaborative robot or an adaptive / intelligent robot.
- Design of the installation using all the data defined and validated by the client from the previous two steps. In the design, it is necessary to define the different phases and parts of the process, as well as the workflows and relationships between the different elements.
- Validation of the most critical points detected during the design phase. For this, prototypes and partial constructions of the installation can be carried out. This step is very important in cases of adaptive or intelligent robotics. Also in those facilities where the variability of parts or processes is very high.
- Industrialization of the facility designed and validated. In this step it is very important to define the tests that will be used to validate the installation.
Do you want to apply robotics in any of your processes or products? Contact us!