Computer Vision
We develop solutions based on computer vision and deep learning for any industry. We accompany you throughout the process, designing a tailored solution.
We use computer vision with our own artificial intelligence algorithm to detect dirty boxes and integrate a turning system to clean them.

Our client, a health product distributor, receives thousands of buckets from its customers that it has to send again with the new products they request. These buckets can reach them with different types of dirt such as papers, pieces of plastic, spills or even rain. It is a big problem since due to cycle time they cannot clean all the buckets, so they need a system that first detects which buckets are dirty and which are not, to be able to clean only the dirty ones. One of the main requirements, in addition to the cycle time, was to impact the current production line as little as possible, since the available spaces were very limited.
The first step consisted of an analysis of the environment, the available space (not only for the inspection system, but also for the cleaning and turning system), requirements, cycle time, types of buckets and cases that could arise. At this point it was defined what was a ‘clean’ bucket and a ‘dirty’ one for the computer vision of dirt system.
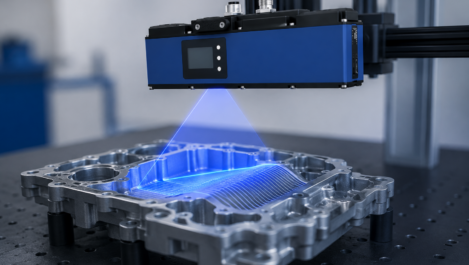
Next, we began with the definition and selection of the necessary vision hardware taking into account distances, resolution and lighting. We worked in parallel on the design and manufacture of the workstation. With the limited space requirement as a focus, the solution we proposed was a compact computer vision of dirt system with turner and conveyor belt that matched the belt they were already using on the line.
After manufacturing the mechanical part, we installed and integrated the system in the client’s factory to begin taking images. At this point we also carried out the development of communications between all the elements of the system and the client’s internal system.
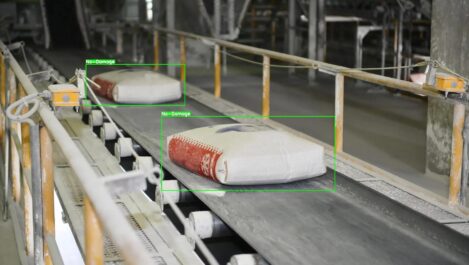
 Then, we were able to start taking images to train the computer vision of dirt system. In this case we design and train our own algorithm based on machine learning and deep learning. A graphical interface was also developed to bring the information closer to plant operators, to show the information that the system is collecting and evaluating. We also generate a historical data that is stored for future consultations and decision making.
Then, we were able to start taking images to train the computer vision of dirt system. In this case we design and train our own algorithm based on machine learning and deep learning. A graphical interface was also developed to bring the information closer to plant operators, to show the information that the system is collecting and evaluating. We also generate a historical data that is stored for future consultations and decision making.
The final step consisted of the validation of the communications and inspections by our client and the training we gave of the system and the developed algorithm. The result was a great success for the client and was replicated in 7 other plants of the group in Spain.

Your success is our goal. We want to be your partner in the development of your projects, leveraging the power of innovation, flexibility, and the trust we provide. Together, we make a difference through new technologies.
Contact us and let’s build the future together!
We are a team of experts passionate about industrial innovation, committed to excellence, and the success of our clients.


Subscribe to our newsletter, and we’ll send you all the content that interests you directly to your email.