En la actualidad una de las mayores preocupaciones de la sociedad es la separación de residuos. La principal solución ante este problema es el reciclaje y la reutilización, para los cuales es necesario mantener una separación correcta de los tipos de residuos a tratar. Es por la complejidad de esta situación que surgió el proyecto SEPARA en el que se han utilizado herramientas como la Inteligencia Artificial y tecnologías de Industria 4.0 para mejorar la eficiencia muchos de los puntos del proceso de separación de plásticos.
En el proyecto SEPARA hemos participado junto con 8 empresas, entre las que se encuentra por ejemplo Ecoembes con The Circular Lab o Trienekens como gestora de la planta de selección de envases, en el desarrollo de tecnología para mejorar los diferentes procesos que se realizan en las plantas de separación de envases. Durante el proyecto, hemos tenido la oportunidad de analizar cada proceso de una planta real y de construir un piloto que nos ha permitido probar e implementar los desarrollos llevados a cabo. Este proyecto sienta las bases y sirve como punto de partida para utilizar las nuevas tecnologías en el ámbito de los residuos.
Tecnologías utilizadas en el proyecto SEPARA para mejorar la eficiencia de plantas de separación de residuos
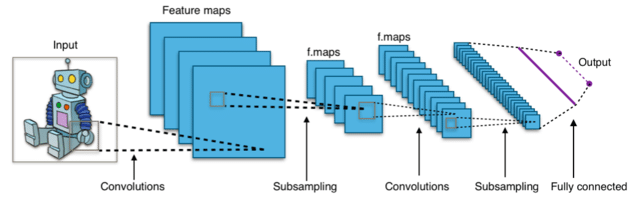
Más concretamente, desde ATRIA, hemos combinado técnicas de Visión Artificial y Deep Learning para la mejora de estos procesos. Estas tecnologías, combinadas, nos permitieron distinguir los diferentes residuos de interés e incluso la posición de los mismos.
Para el desarrollo, ha sido necesaria la adquisición de imágenes que puedan ser analizadas en el momento por este sistema. Debido a la variedad y diversidad de los residuos que se pueden encontrar en SEPARA, se decidió utilizar 3 tipos de cámaras que pudiesen aportar diferentes tipos de información para así diferenciar los residuos encontrados:
- Camara lineal: Similar a una cámara 2D convencional, construye las imágenes linea a linea de pixeles lo cual le permite conseguir una mayor calidad en imágenes de gran tamaño. Su uso es recomendable cuando se quiere obtener la imagen de objetos de gran longitud como, en este caso, una cinta transportadora.
- Sensor 3D: Obtiene datos que permiten recrear el modelo 3D de los objetos visualizados. Gracias a esta información se puede determinar el tamaño de los elementos de la imagen.
- Cámara Hiperespectral: Con esta cámara especial se es capaz de detectar la composición de los objetos de la imagen. De este pueden detectarse objetos plásticos, metálicos, cartón…
Con el uso combinado de estos sensores se ha obtenido un amplio abanico de imágenes con las que realizar pruebas y entrenar el modelo de Inteligencia Artificial utilizado para la detección de objetos en la planta de separación de envases.
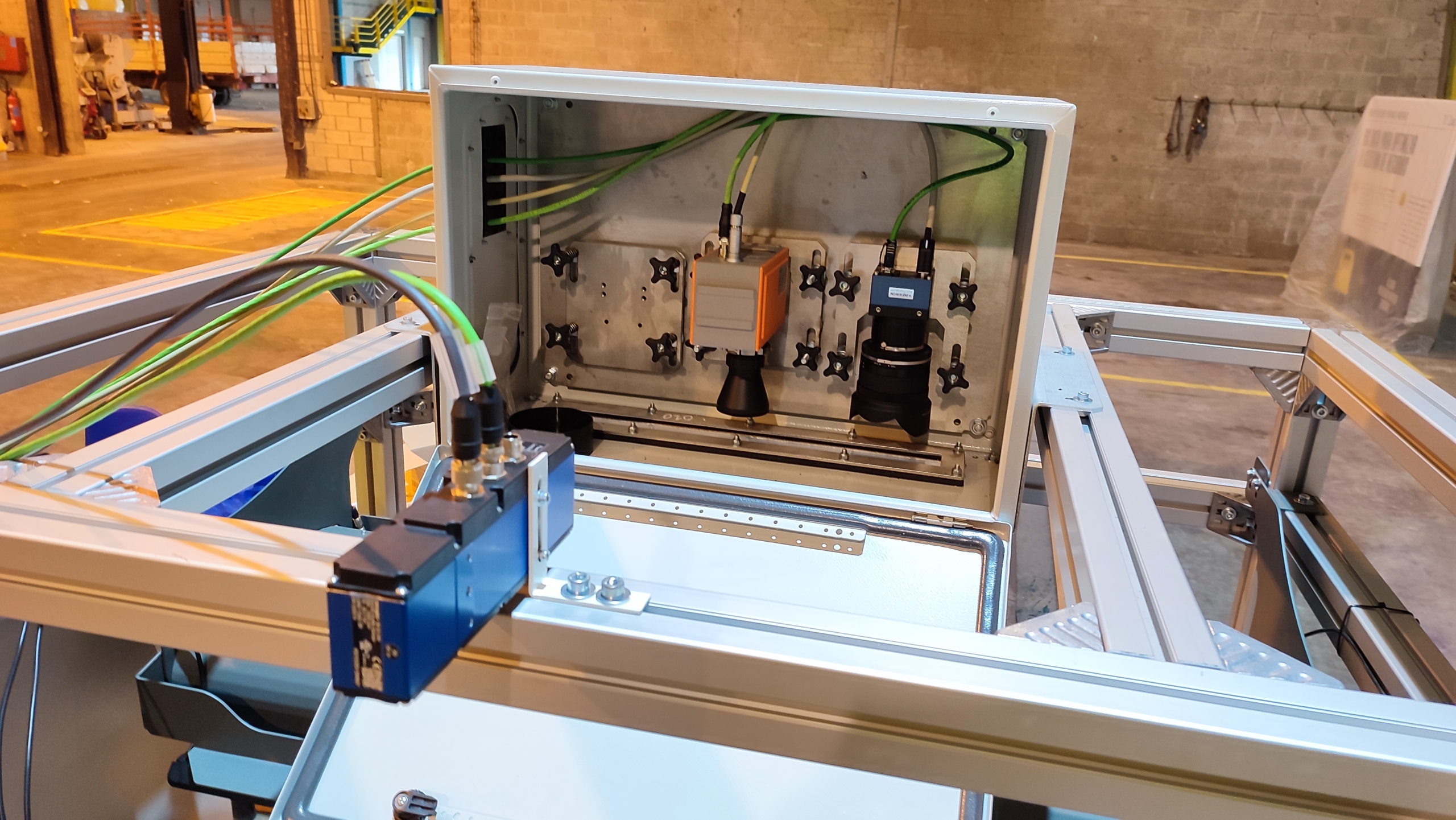
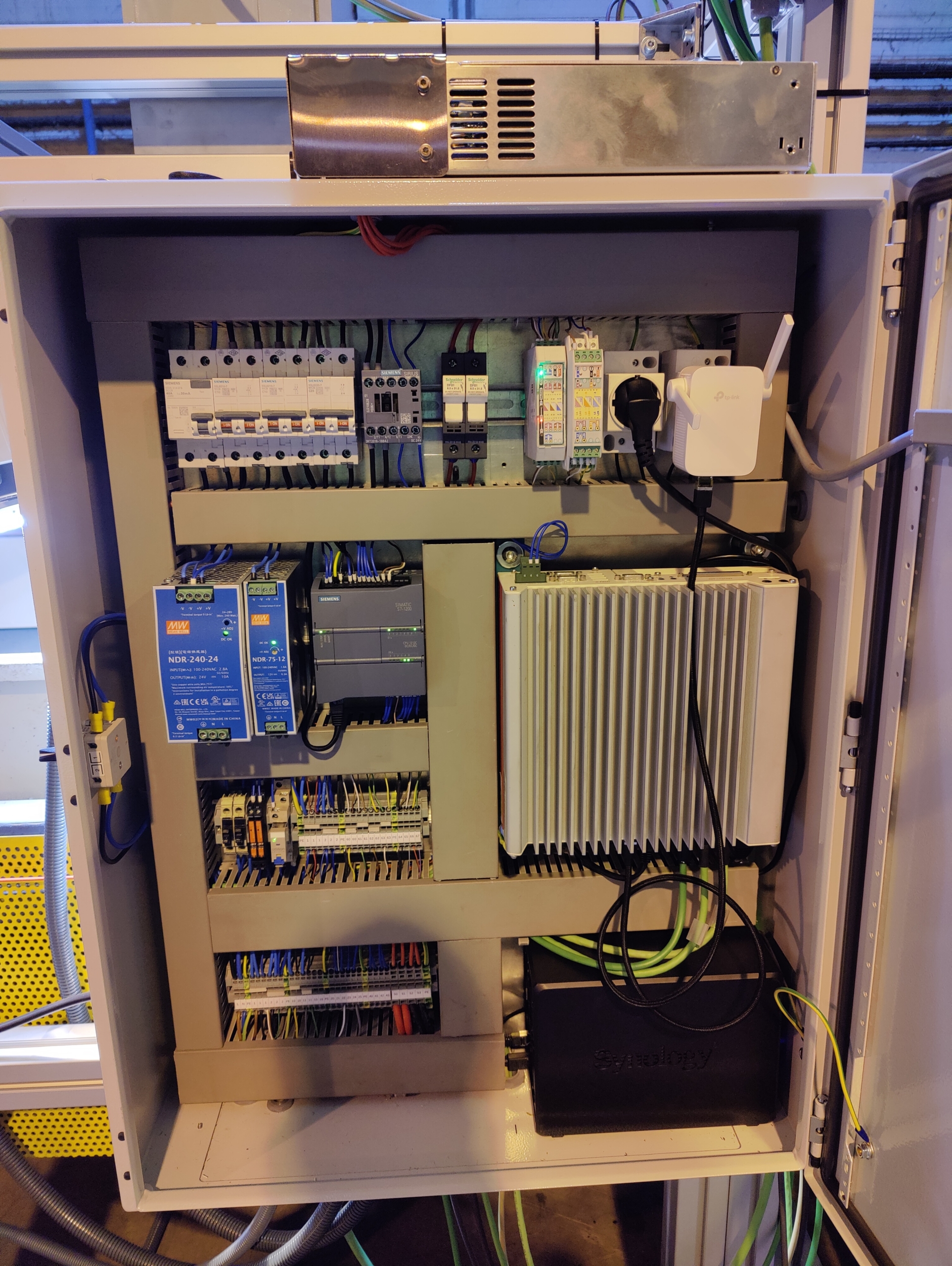
Sistema Instalado en el proyecto SEPARA para mejorar la eficiencia de plantas de separación de residuos
A continuación, os contamos como es el set up instalado durante el proyecto. Con los sensores ya elegidos, se realizo la instalación en la planta de separación de envases de Trienekens, socio del proyecto. El sensor y la cámara para la captura de datos se colocaron en un pórtico sobre la cinta transportadora desde la que se podía observar todos los residuos que pasasen por la misma.
Un PC conectado a dichas cámaras se encargo de realizar la captura de datos con un programa de forma automática cada vez que se realizaba un lanzamiento. Dichos datos fueron almacenados en dicho PC para la construcción de un dataset y su posterior tratamiento.
Adicionalmente y para facilitar el análisis de datos se desarrollo una interfaz que permitiese visualizar la aplicación y los resultados obtenidos.


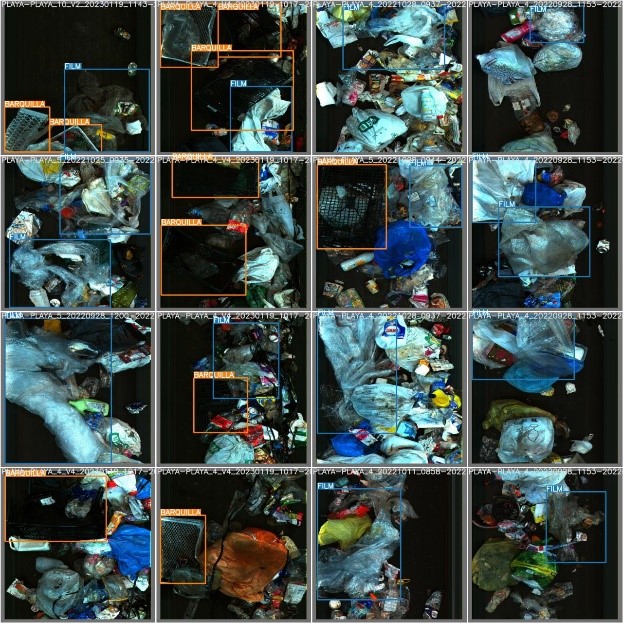
Detección de los residuos en el proyecto SEPARA para mejorar la eficiencia de plantas de separación de residuos
Uno de los puntos más importantes para poder desarrollar modelos de inteligencia artificial es contar con un buen conjunto de datos. Con la instalación preparada para la toma de imágenes, se creó un dataset con el que se representaba los residuos que se podían encontrar en la planta de reciclaje.
De esta forma y trabajando junto a Piperlab, otro de nuestros socios dentro del proyecto, se entrenó un modelo de Deep Learning que permitiese localizar y clasificar diversos residuos en la cinta.
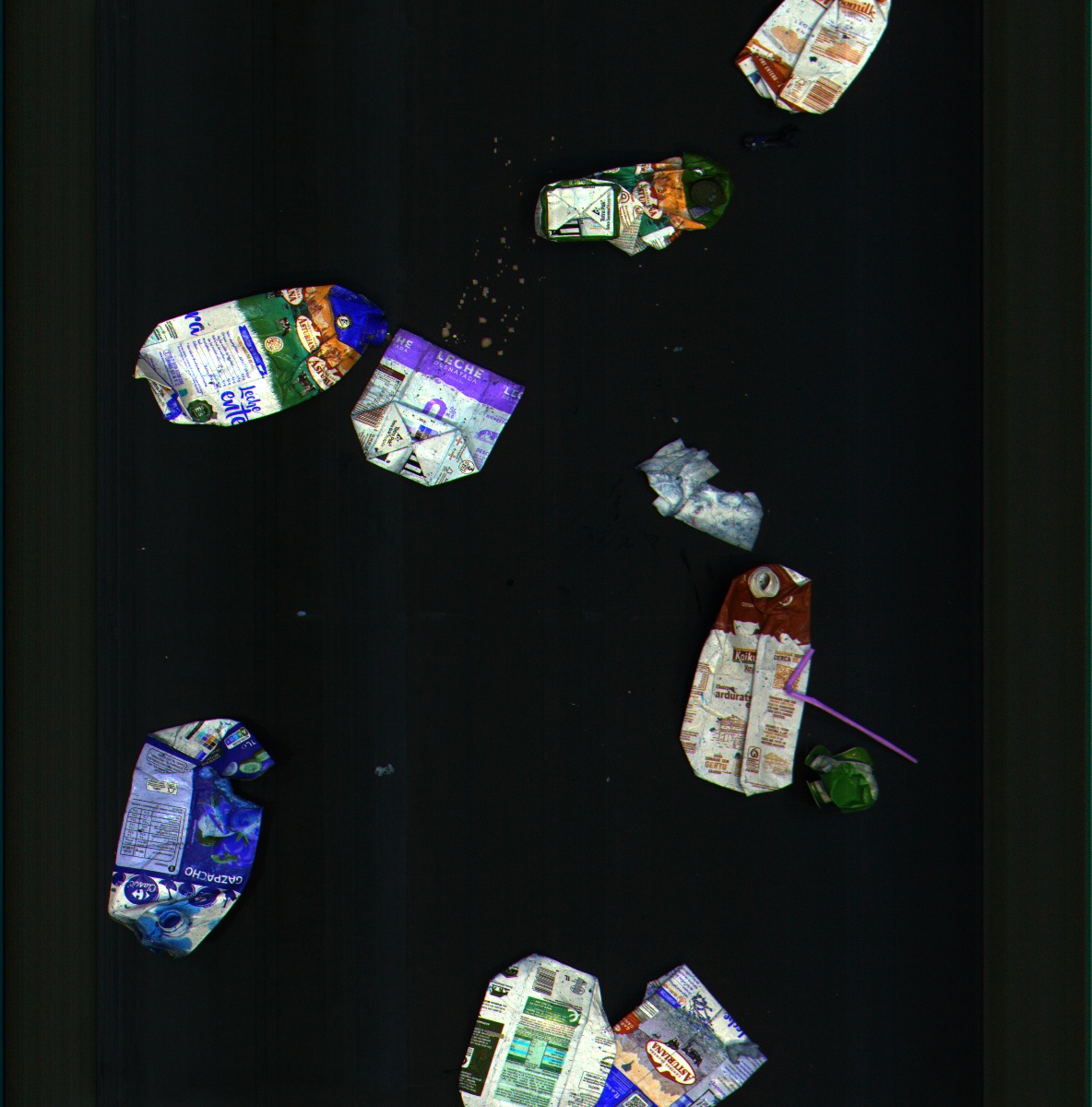
Junto con Ecoembes, socio tractor de este proyecto, se eligieron 4 tipos de residuos que fueron considerados como los puntos críticos a detectar:
- Barquilla
- Film de plástico
- Cinta de Video
- Elementos Filiformes
Los resultados obtenidos con el modelo entrenado son muy prometedores y nos han permitido validar las posibilidades que tiene este tipo de tecnología aplicada a un proceso como la separación de residuos..
Esto deja la puerta abierta a una posible mejora, pudiendo incluir mas residuos o incluso nuevas herramientas y tecnologías como un brazo robótico que pudiese automatizar la extracción de los residuos una vez obtenida su posición.
¿Quieres aplicar Detección de objetos en alguno de tus Proyectos? ¡Contacta con nosotros!










